





hydz 40KHZ ultrasonic sensor
Features
A.Characteristic
1.1) Open structure and separate use
1.2) Compact and light weight
1.3) High sensitivity and sound pressure
1.4) Less power consumption
1.5) High reliability
B. Technical terms
|
No. |
Item |
Unit |
Specification |
|
1 |
Construction |
Open |
|
|
2 |
Using method |
Transmitter/Receiver |
|
|
3 |
Nominal Frequency |
Hz |
40K |
|
4 |
Sensitivity |
≥-68V/u Mbar |
|
|
5 |
S P L |
dB |
≥115(10V/30cm/sine wave) |
|
6 |
Directivity |
60deg |
|
|
7 |
Capacitance |
pF |
2500±20%@1KHz |
|
8 |
Allowable input voltage |
Vp-p |
150(40KHz) |
|
9 |
Detectable range |
m |
10 |
|
10 |
Operating Temperature |
℃ |
-40….+85 |
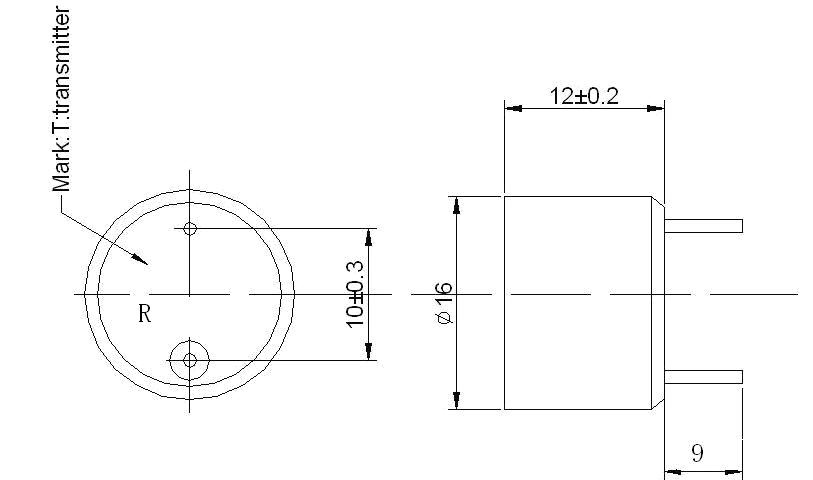
C .Drawing (Mark: T transmitter, R receiver)
Introduction to Ultrasonic Sensors
Ultrasonic sensors are sensors developed using the characteristics of ultrasound. Ultrasonic sensors utilize the piezoelectric effect of piezoelectric ceramics. When an electric signal is applied to a piezoelectric ceramic plate, it will deform, causing the sensor to vibrate and emit ultrasonic waves. When ultrasound hits an obstacle, it reflects back and acts on the piezoelectric ceramic plate through the sensor. Based on the inverse piezoelectric effect, the ultrasound sensor generates an electrical signal output. By utilizing the principle of constant propagation speed of ultrasonic waves in the same medium, the distance between obstacles can be determined based on the time difference between transmitting and receiving signals. Ultrasonic waves will generate significant reflection echoes when they come into contact with impurities or interfaces, and Doppler effects when they come into contact with moving objects. Therefore, ultrasonic sensors are widely used in industries, civilian use, national defense, biomedicine, and other fields.
Applications
1. Automotive anti-collision radar, ultrasonic ranging system, ultrasonic proximity switch;
2. Remote control devices for household appliances, toys, and other electronic devices;
3. Ultrasonic emission and reception devices for anti-theft and disaster prevention equipment.
4.Used to drive away mosquitoes, insects, animals, etc.
Notices
1. The ultrasonic emitter emits an ultrasonic beam at a 60 degree angle outward, so there should be no other obstacles between the probe and the measured object.
2. The ultrasonic module measures the vertical distance between the measured object and the probe, and the probe should be kept facing the measured object during measurement.
3. Ultrasonic measurement is influenced by environmental wind speed, temperature, etc.
Possible issues
1. Due to the influence of unevenness of the measured object, reflection angle, environmental wind speed and temperature, and multiple reflections, ultrasonic waves may increase measurement data errors.
2. Due to the inherent characteristics of ultrasound in measuring blind spots, if the measurement position changes and the received data remains unchanged during close range measurement, it indicates that the measurement blind spot has been entered.
3. If no measurement data is returned when the module is measuring distant objects, it may be outside the measurement range or the measurement angle may be incorrect. The measurement angle can be adjusted appropriately.



